您好!歡迎訪問德爾塔儀器官方網(wǎng)站



gaoshengkeji@163.com

01引言
自我國游客在日本搶購智能馬桶蓋事件的發(fā)生,智能坐便器便以“黑馬”的姿態(tài)闖入大眾視野,被越來越多的民眾所關(guān)注。目前,智能坐便器產(chǎn)業(yè)步入了黃金期,產(chǎn)業(yè)技術(shù)水平持續(xù)提升,智能坐便器產(chǎn)品作為日常潔具逐漸進入了大眾生活,隨著人們生活水平的不斷提高和市場競爭的日益激烈,可靠性指標(biāo)已成為企業(yè)提高產(chǎn)品質(zhì)量、提升品牌知名度、贏得市場的關(guān)鍵因素之一。可靠性也稱為壽命或耐久性,產(chǎn)品的可靠性越好相對壽命就越長,產(chǎn)品的壽命越長也就越經(jīng)久耐用,可靠性因此成為產(chǎn)品綜合質(zhì)量水平的集中體現(xiàn)。

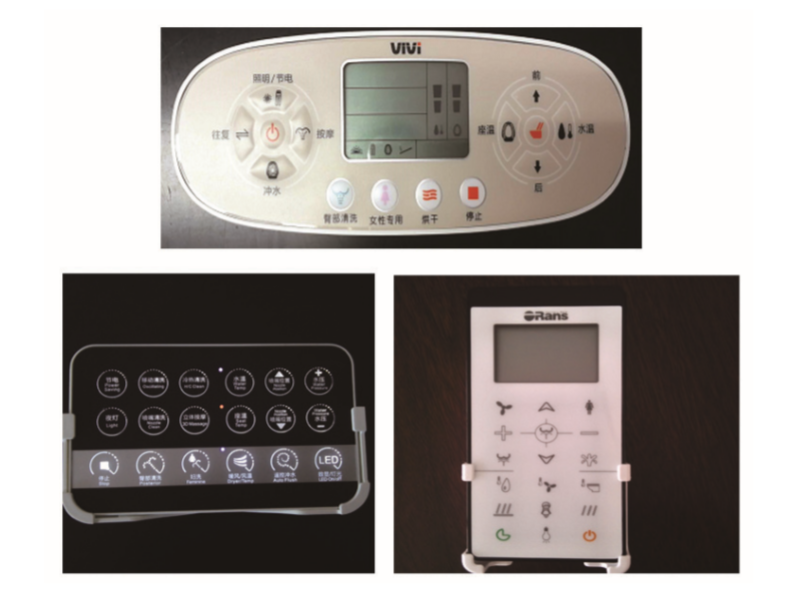
智能坐便器產(chǎn)業(yè)屬于新興產(chǎn)業(yè),檢測中所涉及的可靠性性能檢測設(shè)備全部為非標(biāo)準設(shè)備,存在設(shè)備生產(chǎn)企業(yè)少,設(shè)備定型難、安裝不方便等問題。具體表現(xiàn)如下:(1)設(shè)備便利性方面:對于遙控型的智能坐便器,由于實驗室進行可靠性測試需要在遙控器上操作相應(yīng)的功能,而各個品牌甚至同一品牌不同的系列,都有不同的遙控器,如圖1所示。常見智能坐便器遙控器按鍵的形式有:按鈕型、觸摸感應(yīng)型、薄膜開關(guān)型、觸控型;遙控器按鍵布局有:單面型、正面?zhèn)让嫘汀⒄嫘边呅汀⒄鎯蛇呅停贿b控器的外型有:長方形、長條形、膠囊型、異型。經(jīng)調(diào)研,目前市面上的檢測設(shè)備已經(jīng)無法應(yīng)對快速增長的智能坐便器遙控器發(fā)展的需求,現(xiàn)有的測試系統(tǒng)按鍵檢測使用氣動手指,主要存在安裝不便利、無法夾持、通用性太差等問題。(2)設(shè)備功能方面:國內(nèi)智能坐便器檢測設(shè)備主要生產(chǎn)企業(yè)都不具備打開蓋板、關(guān)閉蓋板、負載持續(xù)加載等步驟,與智能坐便器的實際使用不符合,無法很好地模擬智能坐便器的實際使用情況,影響檢測結(jié)果的準確性。
因此,研制基于機器視覺的智能坐便器遙控器自動識別與可靠性試驗設(shè)備,不僅能構(gòu)建模擬實際使用情況的智能坐便器可靠性試驗系統(tǒng),而且依靠視覺技術(shù)使得安裝更便捷,該設(shè)備對改善行業(yè)產(chǎn)品質(zhì)量,提升產(chǎn)品競爭力具有重要的積極意義。
02機械系統(tǒng)的設(shè)計和原理
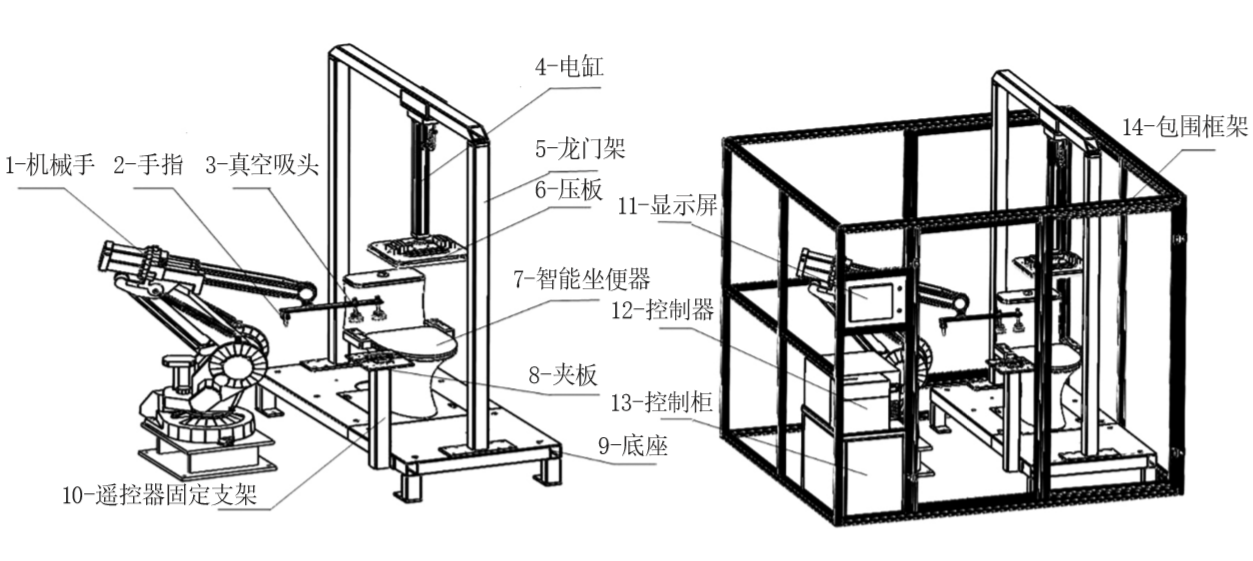
本套系統(tǒng)主要由PLC、電源模塊、步進電機、控制器、六自由度機械手等組成,如圖2所示。本試驗系統(tǒng)能夠?qū)崿F(xiàn)“機械手坐便器掀蓋→移入砝碼加壓→機械手按鈕(依次多個)→移走砝碼→機械手坐便器關(guān)蓋”這樣的周期循環(huán)工作過程,很好地模擬了實際使用智能坐便器的用戶實際場景[1],保證檢測結(jié)果的準確可靠性;并根據(jù)不同廠家不同智能坐便器的功能,進行功能切換;根據(jù)不同消費者的需求,進行不同時間進度的設(shè)置。
2.1 工作原理
本套系統(tǒng)的核心處理部分是機械手和伺服驅(qū)動系統(tǒng),組合實現(xiàn)系統(tǒng)的各種動作。
機械手為六軸組成的空間六桿開鏈機構(gòu),理論上可達到運動范圍內(nèi)任何一點。每個轉(zhuǎn)軸均帶一個齒輪箱,機械手運動精度(綜合)達正負0.05mm至正負0.2mm。六軸均帶AC伺服電機驅(qū)動,每個電機后均有編碼器與剎車。機械手帶有串口測量板(SMB),測量板上帶有六節(jié)可充電的鎳鉻電池,起到保存數(shù)據(jù)的作用。機械手帶有手動松閘按鈕,維修時使用,非正常使用會造成設(shè)備或人員傷害。機械手帶有平衡氣缸或彈簧。
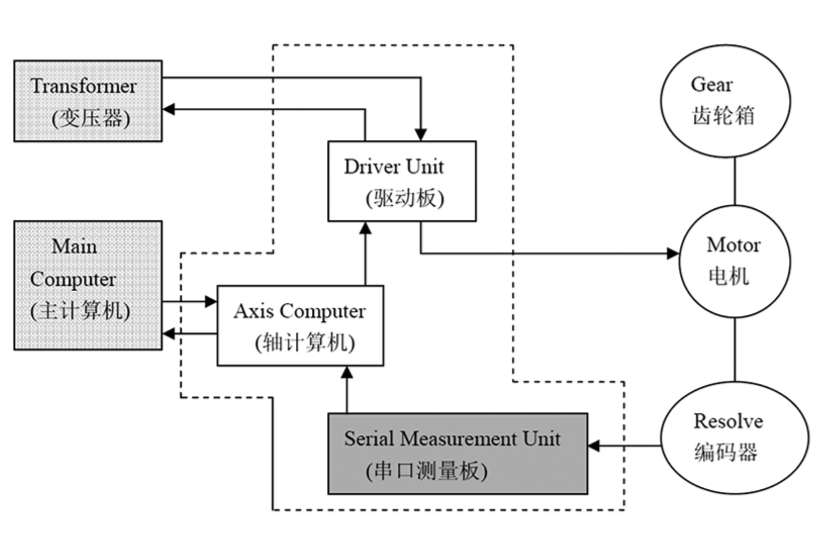
伺服驅(qū)動系統(tǒng)的結(jié)構(gòu)示意圖如圖3所示,其基本功能是對位置、速度和電機電流進行數(shù)字化調(diào)整,對電機的交流控制進行同步。具體而言,伺服驅(qū)動系統(tǒng)又可分為兩部分:(1)下位機部分,負責(zé)讀取傳感器數(shù)據(jù)、解算機械手的姿態(tài)以及控制電機的運動;(2)上位機部分,負責(zé)與下位機通訊、提供API接口函數(shù)以及通過視覺處理獲取按鈕位置。
2.2 系統(tǒng)設(shè)計
(1)夾裝試驗臺設(shè)計。底座上設(shè)有固定坐便器和遙控器的夾具,由于坐便器和遙控器型式不同,夾具采用兩軸加壓板的氣動結(jié)構(gòu),開始檢測前,將坐便器和遙控器分別放置至待夾持區(qū)域,啟動氣動電磁閥,氣缸伸出,固定坐便器和遙控器。
(2)座圈可靠性試驗?zāi)K設(shè)計。采用電缸取代了傳統(tǒng)氣缸,其將伺服電機與絲杠一體化設(shè)計的模塊化,將伺服電機的旋轉(zhuǎn)運動轉(zhuǎn)換成直線運動,同時利用伺服電機最佳優(yōu)點——精確轉(zhuǎn)速控制和精確轉(zhuǎn)數(shù)控制,達到精確推力控制,比原有氣缸的推力更加穩(wěn)定。電缸末端連接柔性材料制成的壓板(模擬人體臀部尺寸)連接在龍門架上,通過電缸的推力精準模擬不同重量的人體的落座。
(3)翻蓋可靠性試驗?zāi)K設(shè)計。通過六自由度機械手的末端安裝有柄梁、真空吸頭手指組成的操作頭,真空吸頭貼合在智能坐便器蓋后,真空發(fā)生器打開,吸頭產(chǎn)生吸附力,在機械手的運動下開啟馬桶蓋或閉上馬桶蓋,手指為柔性材料制成,機械手示教后運動按下相應(yīng)的按鍵(如沖洗、婦洗等)。
(4)數(shù)據(jù)記錄模塊設(shè)計。測控系統(tǒng)的核心由PLC組成[2],PLC的IO口與六自由度機械手的信號線、下壓機構(gòu)電缸的繼電器、真空吸頭的真空發(fā)生器電磁閥及氣動夾具的電磁閥連接。
03視覺系統(tǒng)的設(shè)計和原理
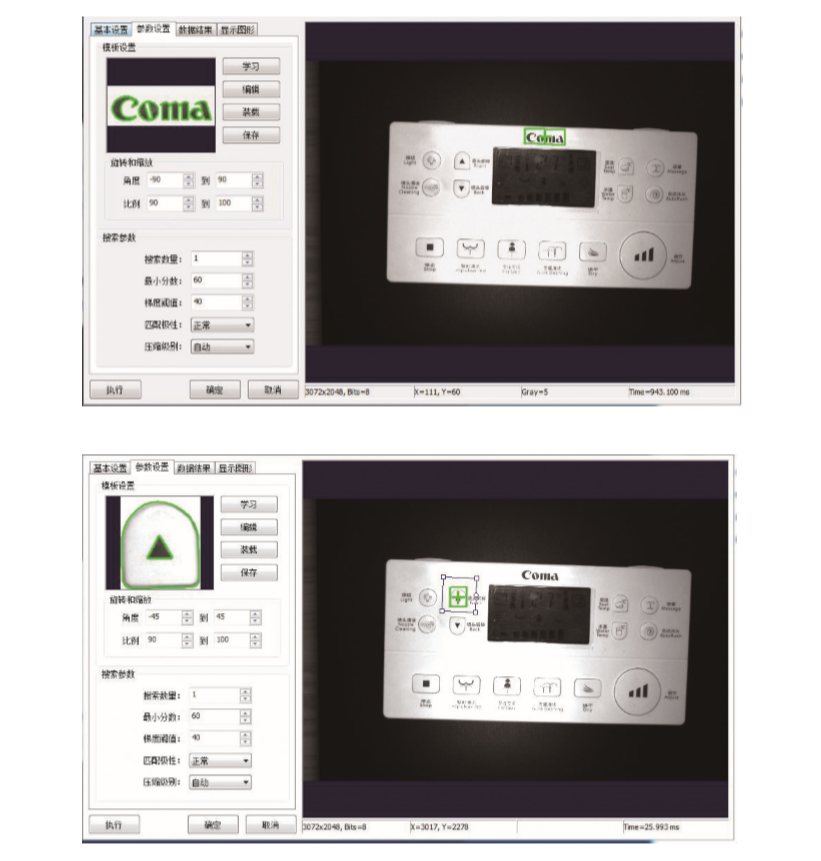
在智能坐便器自動檢測項目中,利用機器視覺快速、準確地獲取遙控板的整體位置信息和全部按鈕位置以及按鈕具體功能信息,機械手根據(jù)這些信息對智能坐便器遙控板進行重復(fù)點擊以實現(xiàn)自動檢測。智能坐便器遙控板檢測軟件型號、按鈕模板設(shè)置界面如圖4所示。
3.1 工作原理
視頻采集裝置采用日本ARTRAY公司的CCD攝像機,攝像機安裝在機械手本體外的固定位置,以便穩(wěn)定識別安裝架上的遙控器,視覺系統(tǒng)可分為圖像獲取、圖像處理、圖像理解、圖像存儲等功能模塊[4],其中最核心的部分是圖像處理,主要實現(xiàn)了圖像的灰度化、圖像的二值化、圖像輪廓的提取以及中心點的生成等。具體到按鈕的識別,其原理主要為:利用按鈕上不同的簡單圖案、數(shù)字或字符,實現(xiàn)按鈕的區(qū)分與位置獲取,即將按鈕識別轉(zhuǎn)化為簡單圖案識別。
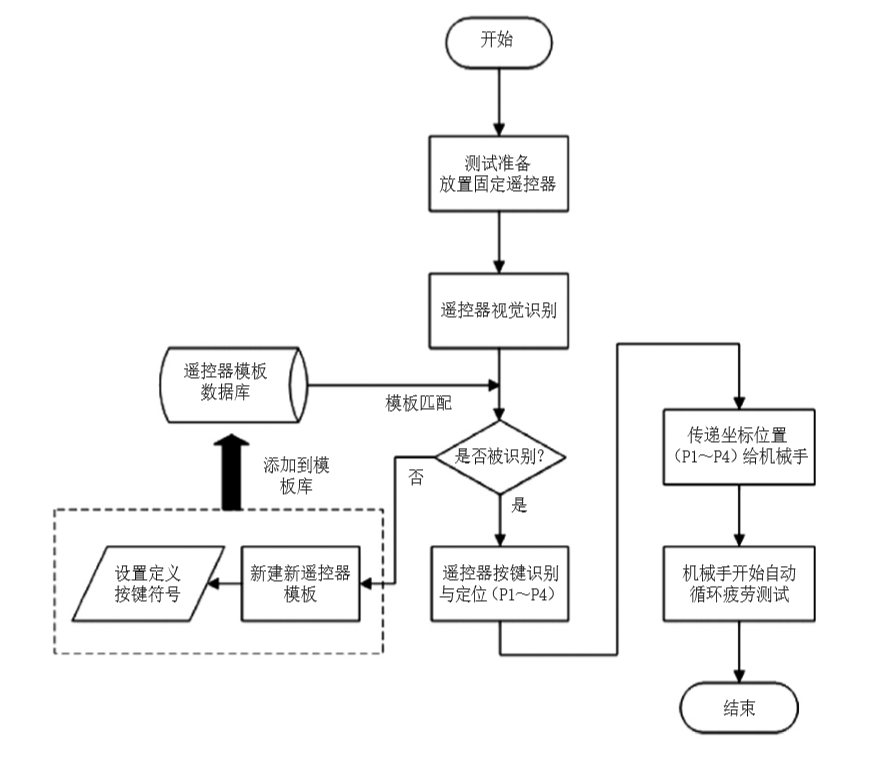
視覺識別流程如圖5所示,首先,固定好遙控器后,系統(tǒng)會嘗試進行視覺識別,若不能識別,會自動新建一個新的遙控器模板,并將其中的功能按鈕也做相關(guān)的定義,整合成一個完整的數(shù)據(jù)包,添加到模板數(shù)據(jù)庫。接著系統(tǒng)會再次對遙控器進行模板匹配,從而識別到該遙控器,若是已經(jīng)測過的遙控器,系統(tǒng)一次便能準確識別到對應(yīng)的模板,如此便能進一步識別到模板中的按鈕圖標(biāo)與定位,將相應(yīng)的位置數(shù)據(jù)傳送給機器人,助力機器人實現(xiàn)自動循環(huán)測試。
3.2 系統(tǒng)設(shè)計
(1)標(biāo)定板標(biāo)定。利用標(biāo)定板進行標(biāo)定,將現(xiàn)實坐標(biāo)系、相機坐標(biāo)系和機械手坐標(biāo)系這三者進行關(guān)聯(lián)。
(2)模板設(shè)置。主要分為部分模板:根據(jù)不同廠家不同型號的遙控板的關(guān)鍵型號信息設(shè)置型號模板,一個型號模板對應(yīng)唯一一款智能坐便器遙控板;每一個按鈕圖案設(shè)置按鈕模板 ,一個按鈕模板對應(yīng)該型號智能坐便器遙控板上的按鈕實際功能。
(3)形狀匹配。按既定時間間隔對相機進行外觸發(fā),得到遙控器圖像,根據(jù)設(shè)置好的型號模板對圖像進行形狀匹配,得到位置信息和對應(yīng)廠家以及對應(yīng)型號信息。并根據(jù)信息找到此前設(shè)置好的該型號按鈕模板,根據(jù)按鈕模板對該智能坐便器遙控板圖像進行形狀匹配,得到所有按鈕的位置信息以及按鈕對應(yīng)的實際功能[3]。
(4)機械手操作。根據(jù)實操作順序,視覺檢測軟件依次將所有的按鈕位置信息通過485通訊協(xié)議傳遞給機械手。機械手移動到相應(yīng)按鈕位置,完成相應(yīng)的操作。
04結(jié)語
基于機器視覺的智能坐便器遙控器自動識別與可靠性試驗設(shè)備已經(jīng)應(yīng)用于浙江省消費者智能坐便器產(chǎn)品質(zhì)量盲測、企業(yè)產(chǎn)品委托定性等項目中,經(jīng)過分析比較,現(xiàn)有設(shè)備更科學(xué)合理,極大地提高了檢測效率和檢驗結(jié)果的準確性,其與傳統(tǒng)設(shè)置比較結(jié)果如表1所示。

通過本系統(tǒng)實現(xiàn)自主、長期的測試,可以及時發(fā)現(xiàn)問題,大大提高智能坐便器的質(zhì)量水平,降低智能坐便器的返修率,進一步促進智能坐便器產(chǎn)業(yè)的發(fā)展。
本文作者
臺州市產(chǎn)品質(zhì)量安全檢測研究院 翁曉偉 葉益陽
浙江大學(xué)臺州研究院 林相華
參考文獻
[1] 樊瑜瑾,槐建明,等. 經(jīng)濟型數(shù)控機床PIE控制系統(tǒng)的研究[J]. 工業(yè)儀表與自動化裝置,2013(04): 34-36.
[2] 雷云飛. 基于數(shù)控系統(tǒng)的嵌入式PLC研究[D]. 廣東工業(yè)大學(xué)碩士論文,2011: 10.
[3] 董文輝. 基于機器視覺的工業(yè)機器人抓取技術(shù)的研究[D]. 華中科技大學(xué)碩士論文,2011:15.
[4] 黃晶晶,陶衛(wèi)軍,等. 一種基于視覺識別的按鈕自主操作機械手[J]. 南京理工大學(xué)學(xué)報,2017(05): 616-622.
[5] 姚創(chuàng)藝,周文錦,張帆,等. 基于六自由度機械手的水嘴耐久性智能試驗系統(tǒng)[J]. 陶瓷,2016(09).
[6] 熊利榮,鄭偉,羅舒豪. 基于觸覺感知的家禽凈膛機械手及其控制系統(tǒng)的設(shè)計[J].農(nóng)業(yè)工程學(xué)報,2018(02).
[7] 黃晶晶,陶衛(wèi)軍,胡洋洋,等.一種基于視覺識別的按鈕自主操作機械手[J].南京理工大學(xué)學(xué)報,2017(10).
[8] 程艷. 基于PLC控制的氣動機械手控制系統(tǒng)研究[J]. 湖南城市學(xué)院學(xué)報,2016(05).
來源:《家電科技》2020年第四期


二維碼(微信公眾號)

二維碼(新浪微博)
 關(guān)閉返回
關(guān)閉返回