您好!歡迎訪問德爾塔儀器官方網(wǎng)站



gaoshengkeji@163.com

一、振動測量技術(shù)
1.1振動測量技術(shù)概論
振動測量在近代工程領(lǐng)域中有著極其重要的意義和地位,受到普遍的重現(xiàn),很多部門和單位都在進(jìn)行實(shí)踐、探索和研究,新的測量方法和手段也在不斷地涌現(xiàn),這是因?yàn)檎駝邮亲匀唤绾凸こ探鐝V泛存在的現(xiàn)象,要利用它來造福人類離不開振動的測量。
振動測量的主要用途為:各種利用振動工作的機(jī)械(如振動給料、振動打夯、振動壓路、振動輸送等),振動篩、振動時效設(shè)備、動平衡機(jī)以及各種激振設(shè)備因其高效率低能耗在國民經(jīng)濟(jì)中得到廣泛的應(yīng)用。為研究其工作機(jī)理以提高生產(chǎn)效率和質(zhì)量,須進(jìn)行大量的振動測量。在試驗(yàn)室內(nèi)對正在設(shè)計(jì)或批量生產(chǎn)的產(chǎn)品進(jìn)行各種振動試驗(yàn)以考核產(chǎn)品承受振動的能力已成為很多企業(yè)的常規(guī)任務(wù)。
實(shí)際系統(tǒng)往往零部件繁多,結(jié)合面形狀復(fù)雜,理論計(jì)算時要進(jìn)行大量的簡化假設(shè),只能作粗略的力學(xué)模型,某些重要參數(shù)至今仍無完善的計(jì)算方法。用振動測量可以求得系統(tǒng)的動態(tài)特性參數(shù)。進(jìn)而適應(yīng)或修正力學(xué)模型,這就是結(jié)構(gòu)動力學(xué)中的系統(tǒng)識別或參數(shù)識別課題。
效益巨大但造價(jià)昂貴的現(xiàn)代化大型系統(tǒng),經(jīng)常在高傳遞、大負(fù)載、高溫、高壓或高真空等惡劣條件下工作,它們的破壞會造成十分嚴(yán)重的后果,據(jù)國外統(tǒng)計(jì),在重要產(chǎn)品的故障中有60%以上來自環(huán)境因素(包括溫度、振動、沖擊、砂塵等),而在諸環(huán)境因素中振動引起的故障幾乎占30%。
各種工程機(jī)械、建筑結(jié)構(gòu)、車輛船舶、飛機(jī)導(dǎo)彈等系統(tǒng)或自身在運(yùn)轉(zhuǎn)過程中產(chǎn)生振動,成為強(qiáng)烈的振源,或受到周圍環(huán)境的激勵產(chǎn)生振動。振動量級過大或持續(xù)時間較長,造成設(shè)備功能失效,嚴(yán)重時會造成事故。
利用振動測量手段對運(yùn)行設(shè)備進(jìn)行在線的狀態(tài)監(jiān)視或故障診斷是保證機(jī)組安全,及時消除隱患的重要措施之一。研究人體各器官的振動傳遞特性,設(shè)計(jì)能減振、隔振的座椅、駕駛艙、手持工具也必須依賴于振動測量。
綜上所述,振動測量是一門綜合性學(xué)科,內(nèi)容豐富,研究的任務(wù)也很艱巨。
振動測量可分為被動式和主動式的振動試驗(yàn)。所謂主動、被動是指振動是否人為施加并且振源是否可控可測,即是否采用激振設(shè)備。另外振動和沖擊,有時沒有明確的界限,如瞬時振動亦稱復(fù)雜脈沖,兩者使用的傳感器和儀器很多可通用。
振動測量的內(nèi)容有以下兒點(diǎn)。
1.振動量的測量
振動量也稱振動參數(shù),一般指被測系統(tǒng)在選定點(diǎn)上選定方向的運(yùn)動量(位移、速度、加速度等),原始數(shù)據(jù)為時間歷程,經(jīng)分析后可得時域統(tǒng)計(jì)值(如幅值、峰值、均方根值等)、相位、頻率、頻譜等。振動量有時也包括力、壓力和角運(yùn)動量(角位移、角速度、角加速度)和力矩等,但角運(yùn)動量傳感器的小型化目前還是難題。
2.系統(tǒng)動態(tài)特性的測量
動態(tài)特性參數(shù)很多,包括:物理參數(shù),即對應(yīng)于空間幾何坐標(biāo)的質(zhì)量、剛度和阻尼;模態(tài)參數(shù),即固有頻率、振型、模態(tài)質(zhì)量、模態(tài)剛度和模態(tài)阻尼:時域的單位脈沖響應(yīng)函數(shù),即實(shí)頻域的頻率響應(yīng)函數(shù),機(jī)械導(dǎo)納或機(jī)械阻抗、傳遞率;復(fù)頻域的傳遞函數(shù)等,在理論上它們可以互相換算。
3.環(huán)境模擬試驗(yàn)
環(huán)境可分為由自然力產(chǎn)生的自然環(huán)境和由機(jī)器運(yùn)轉(zhuǎn)產(chǎn)生的感生環(huán)境。環(huán)境模擬試驗(yàn)也稱動強(qiáng)度試驗(yàn),是將試驗(yàn)樣品放在振動臺上用規(guī)定的參數(shù)模擬環(huán)境進(jìn)行激勵,又可分為:
(1)嚴(yán)格模擬實(shí)際的或預(yù)期的振動環(huán)境。有的用多次測量得到的頻譜按最大值或包絡(luò)線作為規(guī)范譜,也有的用磁帶機(jī)記錄現(xiàn)場環(huán)境振動信號重放在振動臺上。
(2)不需要真實(shí)模擬振動環(huán)境,只要按一定量級的正弦波或掃描正弦波或隨機(jī)波進(jìn)行激勵。這種模擬較為簡單。
(3)除了設(shè)計(jì)驗(yàn)證試驗(yàn)、研制試驗(yàn)、疲勞試驗(yàn)、運(yùn)輸包裝試驗(yàn)外,目前一些重要或尖端工業(yè)采用應(yīng)力篩選試驗(yàn)和綜合環(huán)境可靠性試驗(yàn)(CEPT).在激振同時改變溫度、高度等其他環(huán)境參數(shù)。
4.振動測量的儀器設(shè)備
振動測量所用的儀器設(shè)備很小,有單一功能的和多功能的,還有整體式和組合式之分,可根據(jù)不同要求進(jìn)行不同的選擇和組合。
(1)傳感器,它將振動量轉(zhuǎn)變成可以測量的物理量。目前最常用的是加速度傳感器(加速度計(jì)),
(2)前置放大器,它主要有三種:用于把電荷轉(zhuǎn)變成電壓的電荷放大器;用于放大電壓的電壓放大器;用于高阻抗轉(zhuǎn)變?yōu)榈妥杩沟淖杩棺儞Q器。目前已有將前置放大器直接裝在傳感器內(nèi)的集成電路式加速度計(jì),又有集阻抗變換、放大、歸一化、濾波、供電多種功能于一體的儀器,稱之為信號適調(diào)儀。
(3)信號傳輸、調(diào)制解調(diào)、多路采集、濾波、微積分。
(4)信號記錄、顯示、讀數(shù)、繪圖和打印。
(5)信號分析設(shè)備(頻域分析,時域或時差域分析,幅值域分析等)。
(6)激振設(shè)備包括信號發(fā)生器、功率放大器和激振器(振動臺)。
二、傳感器的選擇和使用
2.1.傳感器的分類
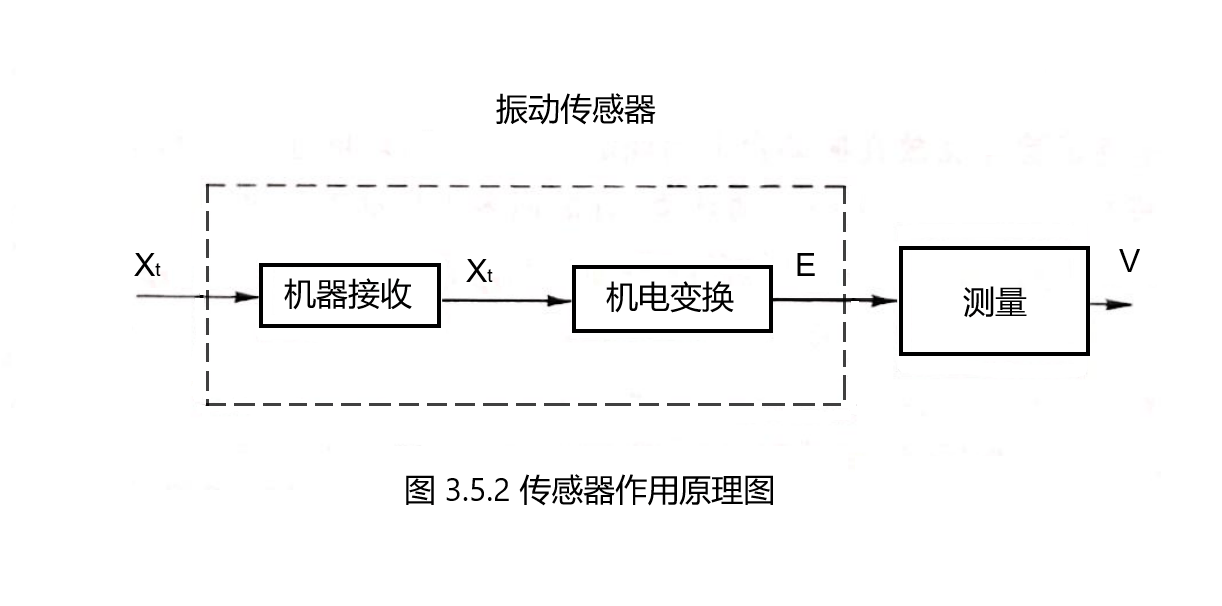
振動傳感器的作用原理可分為兩個部分,即機(jī)械接收和機(jī)電變換,如圖3.5.2所示。機(jī)械接收部分的作用是將被測機(jī)械量Xt(振動的位移、速度或加速度以及力和應(yīng)變等)接收為另一個適合于機(jī)電變換的中間機(jī)械量Xt。機(jī)電變換部分再將Xt變換為電量E(電動勢、電流、電荷量或電阻、電容、電感等電參量)。
傳感器的機(jī)械接收原理分為兩類,即相對式和慣性式。
(1)相對式:以傳感器的外殼作為參數(shù)坐標(biāo),借助頂桿或間隙的變化(非接觸式)直接接收機(jī)械振動。因此被測機(jī)械量與中間機(jī)械量為與頻率無關(guān)的正比關(guān)系。即所謂零階系統(tǒng)。具有相對式接收的傳感器,它所測得的是以外殼為參考坐標(biāo)的相對振動。
(2)慣性式:通過傳感器的內(nèi)部質(zhì)量、彈簧和阻尼器構(gòu)成的單自由度系統(tǒng)接收被測振動。被測機(jī)械量與中間機(jī)械量是用二階微分方程聯(lián)系,故稱之為二階系統(tǒng)。慣性式傳感器所測得的是相對于慣性坐標(biāo)系統(tǒng)的絕對振動,因此也稱為絕對式振動傳感器。
相對式傳感器適用于測量結(jié)構(gòu)上兩部件的相對振動,即直接反映結(jié)構(gòu)本身的彈性變形。這種傳感器只有作為參考的外殼為靜止時,才能測得絕對振動,故而,當(dāng)需要測量結(jié)構(gòu)上某點(diǎn)的絕對振動,而周圍又不能建立靜止參數(shù)坐標(biāo)時,則只能選擇慣性式傳感器。如行駛車輛的振動、樓房的振動及地震等,都必須選擇慣性式傳感器來測量。
振動用傳感器有多種多樣,分類方法也不相同,可以從不同角度分類如下:
(1)按被測物理量分,有位移、速度、加速度等傳感器。
(2)按工作原理分,有壓電效應(yīng)、壓磁效應(yīng)、磁阻效應(yīng)等傳感器。
(3)按能量轉(zhuǎn)換機(jī)理分,有能量轉(zhuǎn)換、能量控制(又稱發(fā)電型和參量型)等傳感器。
(4)按工作機(jī)理分,有結(jié)構(gòu)型(被測參數(shù)變化引起傳感器和結(jié)構(gòu)變化而使輸出電量變化,這種變化是利用物理學(xué)中場的定律和運(yùn)動定律而構(gòu)成)和物性型(利用某些物質(zhì)的物理、化學(xué)性質(zhì)隨被測參數(shù)而變化的原理而構(gòu)成)傳感器。
(5)按轉(zhuǎn)換過程可逆與否分,有:單向(僅能將被測量轉(zhuǎn)換為電量,而不能反之)和雙向(能在傳感器的輸人、輸出端作雙向傳輸?shù)模季邆淇赡嫘缘膫鞲衅鳎﹤鞲衅鳌?/span>
(6)按輸出信號的形式分,有:模擬式和數(shù)字式等傳感器。
三、傳感器工作特性的測試
(1)頻率響應(yīng)和安裝諧振頻率的測試。振動傳感器頻率響應(yīng)的校準(zhǔn)目的,其一是八個確定傳感器所能使用的頻率范圍,對正常的壓電加速度傳感器在低于其諧振頻率1/5的頻段內(nèi),其靈敏度偏差一般在5%內(nèi),而在低于其諧振頻率1/3的頻段內(nèi),其靈敏度偏差一般在10%以內(nèi):其二是檢查加速度計(jì)有無異常響應(yīng),因?yàn)閴弘娫榱押螅铀俣葌鞲衅鞯碾娙萘俊㈧`敏度的變化不十分顯著,而諧振頻率會產(chǎn)生明顯變化,因此諧振頻率的校準(zhǔn)是檢驗(yàn)加速度計(jì)是否損壞的最精確的方法。
傳感器或測量系統(tǒng)頻率響應(yīng)偏差的計(jì)算一般有兩種方法,一種方法是在響應(yīng)平坦的頻段上選一頻率,以此頻率的靈敏度為準(zhǔn),計(jì)算其余各點(diǎn)與該點(diǎn)靈敏度的相對偏差,作為頻響偏差。例如可選取f=100 Hz的點(diǎn);另一種方法是將響應(yīng)平坦的頻段上諸點(diǎn)靈敏度取平均值,以平均靈敏度為準(zhǔn),計(jì)算各點(diǎn)的靈敏度相對偏差作為頻率響應(yīng)偏差,這種方法多用于標(biāo)準(zhǔn)傳感器。
頻率響應(yīng)校準(zhǔn)一般用正弦激勵法,至少在七個頻率點(diǎn)上進(jìn)行,對于多軸向傳感器一般只進(jìn)行每個軸向2000 Hz以下的校準(zhǔn),對于重量較大的單軸傳感器也只進(jìn)行2000 Hz以下的頻率響應(yīng)校準(zhǔn)。除七個頻率響應(yīng)校準(zhǔn)外,尚需進(jìn)行頻率掃描,這是為了檢查傳感器在工作頻段內(nèi),有無局部諧振。在掃描頻段內(nèi),要求所用的振動臺軸向正弦加速度失真小于5%,橫向運(yùn)動小于25%。若頻率響應(yīng)在工作頻段內(nèi)偏差超過10%,可能是傳感器選擇不當(dāng),或者是傳感器性能有所變化,此時應(yīng)當(dāng)重新進(jìn)行校準(zhǔn)。
對非正弦測量,要使信號波形不失真,就要求相移正比于頻率或?yàn)榱愣龋鴫弘娂铀俣葌鞲衅鳎蚱渥枘嵬ǔP∮谂R界阻尼的0.1,一般無需進(jìn)行相頻校準(zhǔn)。如果傳感器是連同濾波器和射極輸出一起使用,則相位隨頻率而改變,往往要進(jìn)行相頻校準(zhǔn)。
目前最常用的頻率校準(zhǔn)方法是正弦單點(diǎn)測量、頻率掃描和隨機(jī)激勵校準(zhǔn),前兩種一般不涉及相頻,后一種可以和標(biāo)準(zhǔn)傳感器進(jìn)行相位比較校準(zhǔn)。此外,還有一種簡易的沖擊法用于確定安裝諧振頻率。
(2)逐點(diǎn)正弦振動頻率響應(yīng)校準(zhǔn)。它比比較法振動裝置簡單,就是將被校和標(biāo)準(zhǔn)傳感器及它們的測量系統(tǒng),背靠背地安裝在校準(zhǔn)臺上,逐個頻率以標(biāo)準(zhǔn)傳感器為準(zhǔn)進(jìn)行相對校準(zhǔn)。面對于高頻標(biāo)準(zhǔn)傳感器則情況復(fù)雜些,因?yàn)閭鞲衅饕M(jìn)行絕對法高頻校準(zhǔn),它的外殼已經(jīng)不能被當(dāng)做剛體,而已經(jīng)呈現(xiàn)了模態(tài)特征。
最簡單的情況是標(biāo)準(zhǔn)傳感器空載時的頻率響應(yīng)和安裝諧振頻率的測定。空載頻率響應(yīng)是指傳感器傳遞面的振動加速度不變的情況下其電輸出和頻率之間的關(guān)系,例如可采用激光干涉法來保持傳遞加速度恒定的情況。
逐點(diǎn)法求取頻響曲線的偏差如前所述或者以某一頻率點(diǎn)為準(zhǔn),或者以平坦段的平均值為準(zhǔn)來考慮問題。在實(shí)踐中也有采用折線法、最小二乘法或直線擬合法,但這些方法都不合二階單自由度的數(shù)學(xué)模型,或者計(jì)算太繁雜,所以比較實(shí)用的是自動掃描法。
(3)自動掃描校準(zhǔn)法。它實(shí)際上也是一種比較校準(zhǔn)。它的校準(zhǔn)激勵源是一個微型振動臺,在臺面內(nèi)裝有參考加速度計(jì)(或參考標(biāo)準(zhǔn)加速度傳感器),這個加速度傳感器的固有頻率遠(yuǎn)遠(yuǎn)高于被校加速度計(jì)的固有頻率。利用此加速度計(jì)線性頻率段的輸出作為臺面激振力的控制信號,就可維持臺面在任意頻率下的加速度值為常數(shù),則被校傳感器的輸出反映了隨頻率變化的情況。被校加速度計(jì)的輸出經(jīng)放大器傳至電平記錄儀即可繪出曲線,這條曲線就是幅頻響應(yīng)曲線。振動臺由功放推動,而功放由壓控振蕩器激勵,振蕩器的頻率掃描由電平記錄儀通過軟軸驅(qū)動,以實(shí)現(xiàn)頻率同步;振蕩器的輸出電平受來自參考加速度計(jì)輸出的控制。利用參考加速度計(jì)的輸出電平使臺面加速度值恒定,即實(shí)現(xiàn)所謂定加速度振動。一般來說,在臺上被校的傳感器質(zhì)量不能太大,它應(yīng)比振動臺活動質(zhì)量部分小近10倍左右。
這種頻率響應(yīng)校準(zhǔn)幅值精度在5%~6%間(約0.5dB)。為改進(jìn)其幅值精度,可采用步進(jìn)式掃描數(shù)字記錄的方法,精度可提高到3%(約0.3dB)。其工作原理為跳點(diǎn)式掃描信號發(fā)生器在控制器的控制下進(jìn)行步進(jìn)頻率掃描,相當(dāng)于每個步進(jìn)點(diǎn)都進(jìn)行一次比較法測量,因而精度有所提高。但和連續(xù)式相比,它是不連續(xù)點(diǎn),是頻率值和兩臺傳感器(被校與內(nèi)裝標(biāo)準(zhǔn))電壓比較的步進(jìn)值。
(4)隨機(jī)振動傳遞函數(shù)法頻率響應(yīng)校準(zhǔn)。正弦校準(zhǔn)受正弦振動不純、諧波失真、噪聲等因素影響:并且它不能給出相位方面的任何信息;再者,受所用電測儀器和分析方法的限制,費(fèi)時較長。對加速度計(jì)及配套的信號適調(diào)儀進(jìn)行動態(tài)校準(zhǔn)時,用數(shù)字測量系統(tǒng)和分析方法處理數(shù)據(jù)較為優(yōu)越。該方法的關(guān)鍵設(shè)備是傅里葉分析儀,它可進(jìn)行二通道的傅里葉分析和二通道間的傳遞函數(shù)分析,同時它還能產(chǎn)生具有相當(dāng)帶寬的白噪聲,由它激勵振動臺,就使頻響的測量和校準(zhǔn)成為可能。標(biāo)準(zhǔn)傳感器是經(jīng)過激光干涉儀的絕對法仔細(xì)校準(zhǔn)的,因而其頻率響應(yīng)的幅頻特性和相頻特性認(rèn)為是已知的。如前所述,對于比較法的幾種情況,若使用靈敏度比較儀,在f=160 Hz時,其總不確定度<1.0%;對于普通的背靠背比較法,在f=160 Hz內(nèi),總不確定度約<2%;全頻段(20Hz~2kHz)內(nèi),總不確定度約在3%~5%;用傅里葉在白噪聲情況下運(yùn)作,則不確定度約為5%。為此,又提出了“切換法”和“替換法”兩種自校正方法,使這種隨機(jī)激勵、快速傅里葉的分析法精度有較大的提高。
(5)傳感器固有頻率和安裝共振頻率的測試。傳感器安裝到被測試件上后,其諧振頻率將有所變化,為此需要了解傳感器安裝共振頻率。用做頻率響應(yīng)的方法,可以掌握傳感器的諧振頻率,但并不直接。不論是逐點(diǎn)、掃描,還是用隨機(jī)激勵方法,都要在振動臺等專用設(shè)備上進(jìn)行,顯然比較慢。為此,可以用簡單的方法或電測的方法對安裝諧振頻率進(jìn)行粗測,以便可立即獲得傳感器的諧振頻率。
1)安裝在鋼塊上的傳感器諧振頻率的測試方法,又稱敲擊法,非常簡單,僅適用于小阻尼的二階系統(tǒng)的壓電加速度傳感器。方法是將加速度計(jì)安裝在質(zhì)量為其10倍的高彈性模量材料做成的立方體或細(xì)長比接近于1的圓柱體的砧子上,然后給砧子施加一瞬時沖擊,持續(xù)時間應(yīng)短于加速度計(jì)自然周期的1/3,用波形記錄儀記錄加速度輸出的激振波形,然后根據(jù)時標(biāo)確定加速度計(jì)的共振頻率。
2)電測法。加速計(jì)通過它的電纜被懸掛著,并通過一個1000 pF電容耦合電壓源激勵。監(jiān)測通過電容和通過加速度計(jì)的兩個電壓,并找出兩者相位差90°時的頻率,即為無阻尼固有頻率的近似值,具體實(shí)施時,調(diào)節(jié)正弦信號發(fā)生器的頻率,仔細(xì)觀察接在示波器X端Y端的信號,得到李沙爾圖時,就得到了近似的傳感器固有頻率。同樣、可以制作一個質(zhì)量塊,也可近似獲得傳感器在各種質(zhì)量下的安裝固有頻率。
值得指出的是,逐點(diǎn)做頻率響應(yīng)、掃描頻率響應(yīng)和隨機(jī)頻率響應(yīng)校準(zhǔn)時,使用設(shè)備昂貴,更主要的是由于振動臺的頻率限制,不可能做得很高。電測法使用簡單,儀器通用,而且頻率可以做得較高。電測法諧振頻率測試精度取決于使用的各種儀器的精度,有時在諧振峰處,頻率偏差可達(dá)數(shù)十或上百周。
(6)橫向靈敏度的測試。理想的振動傳感器只對軸向(z軸)振動有響應(yīng),而對于與z軸垂直的x·y平面內(nèi)的振動無響應(yīng)。實(shí)際傳感器則做不到這點(diǎn),其原因是多方面的,如機(jī)械加工、裝配精度、裝配時剪應(yīng)力的存在、加速度計(jì)的慣性質(zhì)量不平衡、晶體片的不均勻、結(jié)構(gòu)的不平衡、橫向電纜效應(yīng)、電荷靈敏軸和電壓靈敏軸不相重合等都會造成傳感器具有橫向效應(yīng),因而存在橫向靈敏度。
加速度計(jì)傳感器的橫向靈敏度是頻率的函數(shù),低頻時一般在3%以下,高頻時在10%或更大。大多數(shù)傳感器的橫向靈敏度共振頻率常在軸向共振頻率的1/3處或略高。因而橫向靈敏度的存在對加速度計(jì)的測試是有誤差影響的。一般測試要求TSR<(3%~5%)。精確些的某些測試和校準(zhǔn)則要求TSR不大于1%~2%。橫向靈敏度測試的難點(diǎn)在于振動源本身的橫向要很小,而且又要轉(zhuǎn)動角度尋找最大橫向靈敏度方向,又要變動頻率,尋找橫向共振的頻率。
橫向靈敏度測試方法有橫向夾具法、共振梁法、共振架法、簧片梁法、低頻大振幅法、向量測量法、橫向補(bǔ)償加速度法等,這些測試法的具體方法這里不再詳述。
來源:《力學(xué)環(huán)境試驗(yàn)技術(shù)》部分


二維碼(微信公眾號)

二維碼(新浪微博)
 關(guān)閉返回
關(guān)閉返回