您好!歡迎訪問德爾塔儀器官方網站



gaoshengkeji@163.com

工業機器人是現在生產常用的自動化設備,也叫工業機械手臂,機械臂,機械手,機器手臂等等;在日常接觸機器人的時候會常常提到機器人幾軸這個問題,下面我們來介紹一下工業機器人幾軸的定義;機器人幾軸怎么看和怎么區分!并附件機器人軸數的標記和功能圖。
首先工業機器人分為幾大類型:
1、常用的關節型機器人,就是我們說的幾軸機器人的代表,應用更廣泛;
2、蜘蛛手機器人,是快速分揀搬運工業機器人在藥品食品行業使用較多;
3、水平多關節機器人,是四軸的機器人在電子行業應用較多。
工業機器人幾軸的定義:
通過以上信息我們知道了幾軸機器人通常是指關節型機器人,幾軸又叫幾個自由度,是代表工業機器人的靈活性的指標,軸(自由度)數越多其運動功能越強大,靈活度更高。
軸與卡迪爾坐標系息息相關。三軸機器人也被稱為直角坐標或者笛卡爾機器人,它的三個軸可以允許機器人沿三個軸的方向進行運動;而六軸機器人中的六軸,就是笛卡爾坐標系中的X Y Z軸,及繞X Y Z軸旋轉的U V W軸。現在,市面上的機器人,軸的數目從一到七,不僅有單軸機器人,也有七軸機器人。
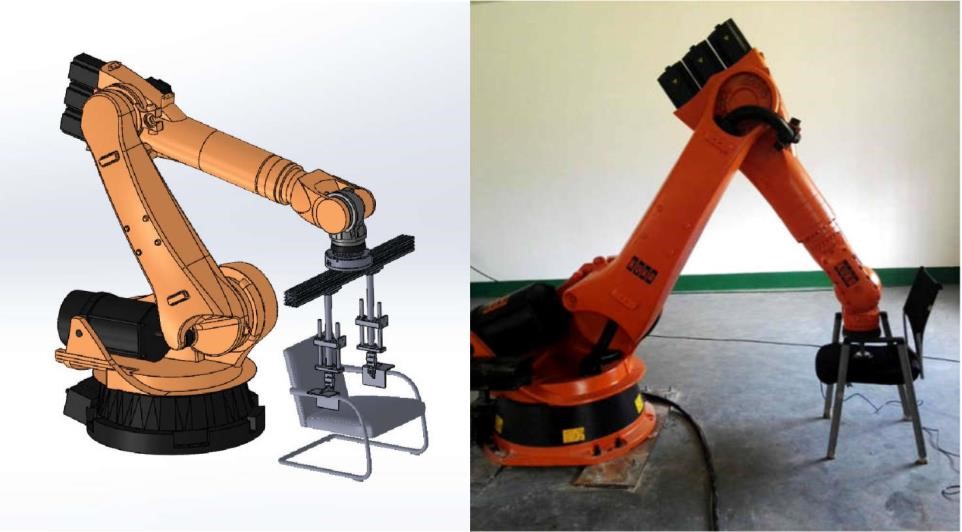
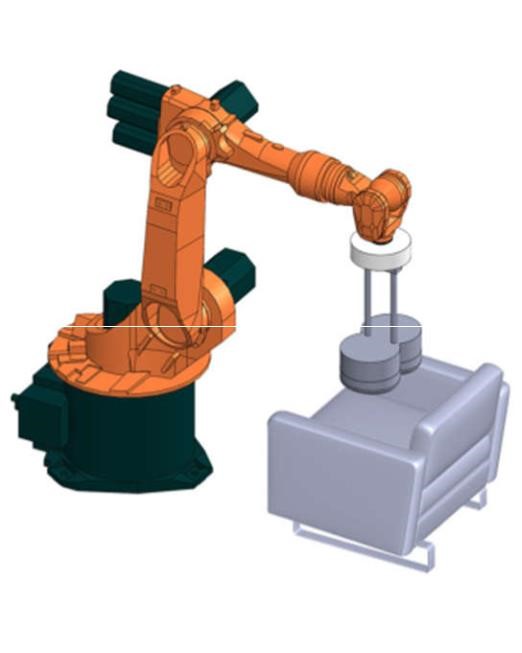
機器人幾軸怎么看,機器人幾軸怎么區分?(如圖)

上圖是六軸協作機器人,也是工業機器人的一種,六軸協作機器人每個軸都帶有一個旋轉功能,以關節型來說是指四軸機器人、五軸機器人、六軸機器人這幾軸機器人都是在上圖基礎上結構類似的,如四軸機器人就只是少了5軸翻轉功能和4軸圓筒旋轉功能,其可以在兩個平面之間實現物品搬運;而六軸機器人則不只是在兩個平面搬運、它基本可以在“360”的的范圍搬運,可以做噴涂,可以焊接,可以上下料,可以做機臺配套,加工等等,只需要配套相應的非標來實現抓取或者噴涂、焊接等自動化改造,并且軸數越多,機器人占地空間越小。
那么,是不是機器人軸數越多就越好呢?
機器人的軸數越多越靈活,所占空間位置越小,這個是沒錯的。但是絕對不能說機器人軸越多越好。工業機器人具有各種軸配置,具體取決于任務和所需的運動范圍。它們的尺寸也減小了,這使它們可以在較小規模的應用程序中執行任務并減少占用空間。機器人的軸俗稱關節,好像人的胳膊,關節越多,可以旋轉和到達的位置就更多一些,
但是,機器人軸數越多,機器人控制系統越復雜,其造價越高,節拍也會更慢一點,目前來看,六軸是相對平衡的一個軸數,性價比也最高。六軸機器人的其他優勢包括移動性(易于移動和/或安裝)以及寬廣的水平和垂直范圍。它們特別用于汽車和航空航天制造,在其中進行鉆孔,螺絲驅動,噴漆和粘接。改善的手腕動作和靈活性,機器人軟件和編程功能以及多種安裝選項只是六軸機器人必須提供的部分優勢。還有各種各樣的機器人尺寸,有效負載和速度可供選擇。六軸機器人也變得更加易于維護,修理或更換。
而協作式六軸機器人往往更小,更輕巧,并且不需要安全屏障,從而減少了它們在車間的占地面積。
Delta德爾塔儀器是一家專注于檢驗檢測領域機器人應用系統的服務商,適用于汽車零部件測試實驗室、理化實驗室、機電實驗室、輕工五金實驗室、家具實驗室、建筑建材實驗室等領域的檢測設備設計研發、生產制造、實驗室輔導和規劃為一體的智能科技型企業,為產品試驗提供整體解決方案的專業服務商。
今天,我們將結合實際應用案例,為大家展示檢驗行業中Delta德爾塔儀器公司實際開發項目案例,話不多說,讓我們一同走進車間感受協作機器人的力量吧。
智能家居中的智能鎖、家用電器行業應用——門開關壽命耐久
1、智能門鎖壽命耐久性測試系統

電子/指紋門鎖壽命耐久性測試系統用于對電子防盜鎖等產品進行生物識別開門、指紋開門、鑰匙開門、密碼開門,磁卡開門、人臉識別開門、機械鑰匙開鎖等模擬用途行為測試,本系統提供多種測試模式可供試驗選擇,符合GA374-2019、GB 21556-2008 鎖具安全通用技術條件,JG/T 394-2012,IEC 62692 數字門鎖系統標準,UL294門禁系統、UL1037,BHMA A156.25,BHMA A156.13,BHMA A156.36等相關標準試驗要求。專為密碼電子門鎖,指紋電子門鎖,刷卡智能門鎖研發設計的一體化壽命測試系統;符合標準:JG/T394-2012《建筑智能門鎖通用技術要求》中的反復啟閉次數6.14。
2、家用電器門開關壽命耐久性測試系統


家用電器門開關壽命耐久性測試系統能夠符合 IEC60335-1/GB4706.1《家用和類似用途電器的安全第 1 部分 :通用要求》、IEC60335-2-24:2007/GB 4706.13-2014 《家用和類似用途電器的安全 制冷器具、冰淇淋機和制冰機的特殊要求》、IEC60335-2-7/GB4706.24-2008《家用和類似用途電器的安全 洗衣機的特殊要求》以及 GB/T 8059-2016《家用和類似用途制冷器具》標準中第10章節“門、蓋和抽屜的耐久性試驗”等要求。本測試系統是根據各類電冰箱、洗衣機、微波爐、烤箱、消毒柜的門鎖扣及鉸鏈的使用壽命的標準測試要求而設計制造的一款智能機器人自動測試設備,系統你那個根據被測冰箱、洗衣機的不同規格要求,靈活并全面地進行各類指標設置、動作模擬。
3、鋁合金門窗耐久性測試系統

新國標鋁合金門窗耐久性測試系統滿足標準 GB/T8478-2020《鋁合金門窗》標準中第6.6.9、第6.6.10條款的全部要求,同時能夠滿足 GB/T39529-2020《系統門窗通用技術條件》及 GB 17565-2007《防盜安全門通用技術條件》。適用于門窗力學性能為活動扇在機械力作用下保持正常使用功能的能力,能根據門、窗的開啟形式和使用特點進行模擬確定其力學性能的各項試驗要求。本測試系統可用于替代傳統建筑門窗檢驗驗室的用氣缸和電機驅動的體積笨大、功能單一的壽命試驗機,一機多用,檢驗方法和實現測試功能的手段靈活多變,可實現多種規格多種形式的門窗及五金件的壽命耐久性試驗,并可拓展為家用電器門蓋、防盜門、高鐵動車車門、汽車車門及其零部件等啟閉耐久性試驗,應用領域廣泛。
4、家具綜合力學智能測試系統
家具綜合力學檢測機器人系統面向傳統的數控加工行業運動控制技術而升級研制出的具有開放結構、能結合具體應用要求而快速重組的運動控制系統,采用基于網絡的開放式結構,利用 DSP 的計算能力,進行復雜的運動規劃、高速實時多軸插補、誤差補償和運動學、動力學計算,實現運動控制的高精度、高速度和平穩運動。從而實現對家具如:(桌子、椅子、柜子、床)的力學性能測試。 針對家具力學性能測試模擬家具在正常使用和習慣誤用時,各部位受到一次性或重復性載荷的條件下所具的強度或承受能力的試驗。 對試樣四邊以規定的力值進行反復循環加載。一定次數后,檢查試樣結構,功能等方面是否存在損壞,籍此了解產品的性能及缺陷。
5、柜子及柜門耐久性測試系統機器人
柜子及柜門耐久性測試系統機器人用于模擬柜子,柜類家具在日常使用時承受載荷的條件下,所具有的抗傾翻能力。柜子及柜門耐久性測試系統機器人適用于對柜子及柜門的強度、疲勞及耐久性測試。機器人測試加載墊:直徑200mm。
依據標準:
GB/T 10357.5-2011《家具力學性能試驗 第5部分:柜類強度和耐久性》
l7.1.2.1拉門垂直加載試驗
l7.1.4拉門耐久性試驗
GB/T10357.4-2013 4.4 柜類穩定性
GB/T10357.4-2013 4.5.2 活動部件打開時的加載穩定性試驗
GB/T 18884.3-2015 4.6.2.7 柜門耐久性試驗
GB/T 29498-2013 5.4.5.4 木門反復啟閉耐久性能
6、辦公椅耐久性測試系統機器人
椅子耐久性測試機器人系統適用于對辦公椅的強度耐久性進行測試,座面、椅背耐久性聯合測試,扶手枕靠耐久性, 靠背、扶手沖擊,向前穩定性能。配套夾具可輕松方便調整加載位置以適應不同規格的試樣,定位把手方便定位,提高工作效率,試樣裝夾無需工具配合,簡單快捷方便。
7、床墊耐久性測試系統機器人

床墊耐久性測試系統機器人適用于對床墊墊面中心睡眠區域采用一定重量的輥筒進行滾壓測試,模擬睡眠過程中人體翻滾情況對床墊造成的影響,對床墊邊部以規定形狀的加載墊及規定的力值進行加載耐久性測試,模擬使用者坐于床墊邊部,臀部對床墊進行加載而造成的影響。進行一定次數的加載后,對比測試前后墊面高度,圍邊高度,硬度的變化及床墊損壞的情況,以評定床墊的質量。
測試項目:包括以下測試及測量項目:
1.墊面耐久性測試
2.邊部耐久性測試
3.床墊高度測量
4.硬度值測量
8、床墊回彈性測試系統機器人

床墊回彈性測試系統機器人適用于模擬彈簧床墊在使用中遭遇人體臀部的沖擊,以評估其疲勞壽命性能。用臀部造型的沖擊頭在床墊和盒彈簧單元的表面施加可重復、可控制和計數的撞擊,測量床墊和盒彈簧單元的支撐堅固程度,利用床墊表面形成的凹窩來測量床墊和盒彈簧單元的變形。床墊回彈性測試系統機器人使用特定的加載塊反復對床墊進行沖擊, 評估其耐用性和彈簧的堅牢保持度。
9、沙發耐久性測試系統機器人
沙發耐久性測試系統機器人是用于模擬日常使用情況下,沙發對長期重復性載荷的承受能力。沙發耐久性測試系統機器人主要是試驗沙發的座,背,扶手的耐久性。試驗時將一定形狀,質量的加載模塊,以規定的加載形式,頻率,分別對座,背,扶手表面重復加載。
沙發耐久性測試系統機器人技術參數:
1.座面加載模塊:50kg直徑200mm沖擊面R341mm
2.背面加載模塊:200mmx100mm
3.扶手加載模塊:直徑50mm
4.配 重 塊:70kg,直徑350mm
5.加 載 頻 率:0.33Hz~0.42Hz(20~25次/min)
6.背部加載塊間距:300mm
7.扶手加載角度:45度
汽車行業運用——檢測
10、汽車座椅疲勞耐久性測試系統

汽車座椅疲勞耐久性測試系統機器人應用最先進的協作機器人技術及自動控制與測量融入到汽車座椅的疲勞測試中,實現座椅測試與測量的一體化及自動化,可以做到對于動作過程的位置及力量的精確控制,在動作的過程中完成特性參數的測量。該系統可通過機器人驅動控制對座椅以一定的速度,一定的負載反復沖擊,對座椅耐久性能、座椅安全性能方面的試驗。
汽車座椅疲勞耐久性測試系統適用于國家標準 GB15083-2004 及專業標 ZBT26008 中規定的汽車座椅耐久性能試驗的測試;其性能指標完全可以滿足國內外標準,例如 ECER17(歐共體法規)、FMVSS207(美國聯邦法規)、國標以及德國大眾公司EP標準中對座椅耐久性能、座椅安全性能方面的試驗要求。
測試項目:
1、汽車座椅坐墊耐久性試驗;
2、汽車座椅坐墊靜剛度試驗;
3、汽車座椅調角器交變載荷耐久性試驗。
主要技術參數:
1、加載行程:0~600mm;
2、加載負荷:0~200Kg(或指定);
3、加載頻率 0~30次/分鐘。
11、汽車車門開閉耐久性試驗系統

汽車車門開閉耐久性試驗系統主要用于小型乘用車、SUV(越野車)、商務MPV的側開車門、發動機罩、后背門(行李箱蓋)和加油口蓋的開閉耐久性試驗;以驗證四門兩蓋系統結構與強度是否滿足產品設計要求。
一、依據標準:
1)GB15086《汽車門鎖及車門保持件的性能要求和試驗方法》
2)QC/T 586《汽車門鉸鏈》
3)QC/ T323《汽車門鎖和陳保持件》
4)QC/T 627《汽車電動門鎖裝置》
5)QJQ 6136-2010 《開閉件系統可靠性試驗方法》
6)Q/JSKW-B-0028-2020《乘用車開閉件耐久試驗規范》
注:未標年份的標準采用頒布、修訂或正在修訂的標準
二、試驗項目:
1)側門開閉耐久試驗;
2)發動機蓋開閉耐久試驗;
3)行李箱蓋開閉耐久試驗;
4)關門速度性能試驗;
5)關門力性能試驗。
12、智能機器人全自動沖擊試驗系統
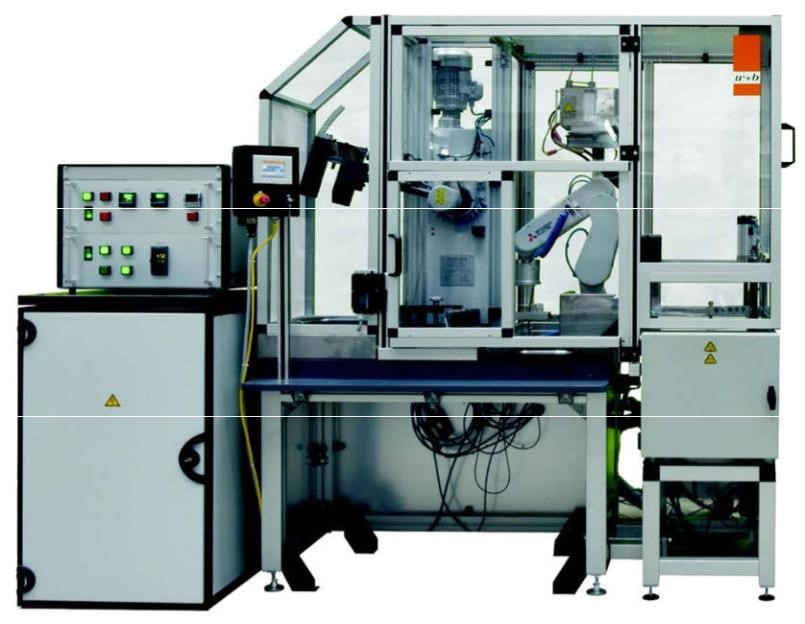
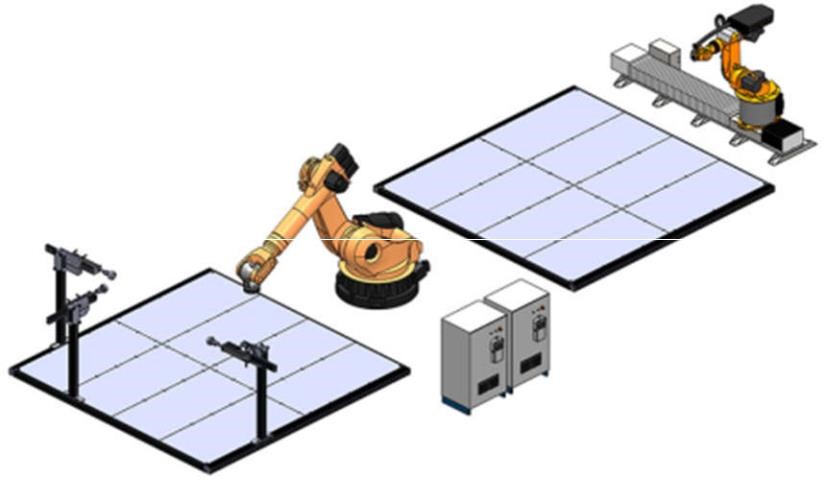
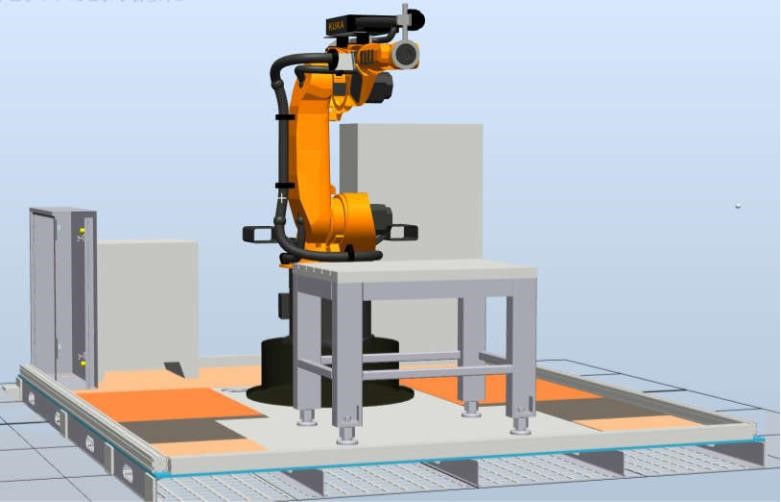
智能機器人全自動沖擊系統集成了金屬材料力學沖擊試驗機、自動控溫低溫槽、視覺定位、機器人、分揀收集裝置及信息管理軟件等系統,在人工進行批量試樣的上料、組批及下達任務后,系統將自動進行試樣的降溫、保溫、上料、沖擊,并在試驗完成后自動上傳試驗數據,實現了全自動沖擊試驗。
智能機器人全自動沖擊系統的結構如圖所示,由機器人對沖擊試樣的參數進行設定:試驗時間(從冷卻環境到完成沖擊)小于4.5s;沖擊試樣缺口對稱面偏離砧座中點不大于0.1mm(行業要求不大于0.5mm)。試驗完成后,系統會得出沖擊試樣是否合格的結果。
智能機器人全自動沖擊系統提高了實驗室裝備的智能化水平,可實現低溫槽的自動保溫控制,提高了上料節奏的穩定性,確保試樣擺放位置的精確度,實現數據的自動傳輸,增強了試驗操作的規范性,排除了人為誤差,提高了試驗準確性與工作效率。
一、試驗標準:
智能機器人全自動沖擊試驗系統按照 GB/T 229-2007?金屬材料夏比擺錘沖擊試驗方法?(或 ISO 148-1:2006
MetallicMaterials—CharpyPendulumImpactTest—Part1:TestMethod)和ASTME23-2012cStandardTestMethods
for Notched Bar Impact Testing of Metallic Materials進行沖擊試驗。其中,GB/T 229-2007(或ISO 148-1:2006)
適用于室溫以及高低溫下的試驗,而ASTME23-2012c適用于溫度高于-196℃的試驗。智能機器人全自動沖擊系統按照夏比擺錘沖擊試驗標準要求而研發,在取放樣節奏、放樣位置、試樣傳送、記錄和讀取試驗數據等方面都進行了嚴格的控制。
二、試驗過程:
在采用智能機器人全自動沖擊試驗系統進行沖擊試驗前需做好準備工作,包括檢查設備的狀態和試樣是否符合試驗標準,如查看擺錘擺放是否到位、沖擊刀刃與試樣間隙是否達標、指針是否回零、沖擊系統手臂擺放位置是否準確等。試驗過程按照GB/T 229-2007(或ISO 148-1:2006)或者ASTM E23-2012c規定的方法進行。智能機器人全自動沖擊試驗系統按照夏比擺錘沖擊試驗標準設定,沖擊試驗時間恒定,保證了試驗節奏的一致性,得到的試驗結果偏差小且數據分布更為集中,減少了人為誤差和試驗結果的波動性,降低了試驗結果的誤判和錯判的概率,提高了試驗效率和結果準確率。
13、智能機器人全自動拉伸試驗機系統

智能機器人全自動拉伸試驗機系統產品集成了材料力學拉伸試驗機、全自動測量裝置、機器人及信息管理軟件等系統,在人工進行批量試樣的上料、組批及分類任務下達后,自動進行試樣的上料、測量、對中、拉伸、廢樣分類擺放,測量數據自動上傳,實驗結果自動上傳,自動判別是否合格,實現了拉伸實驗室的全自動拉伸試驗。本試驗系統提高了實驗室裝備的智能化水平,可實現試樣的自動測量與對中,精確的數據測量,試驗結果的自動傳輸,規范了試驗操作,排除人為誤差,提高了試驗準確性和工作效率。本試驗系統代表了我國實驗室智能技術裝備的發展水平,將成為我國智能實驗室拉伸試驗的主流機型。
產品創新點:
1、基于智能化的力學實驗室拉伸試驗集成設計;
2、自主研發通訊接口板,實現對進口拉伸試驗機的控制;
3、開發了后臺數據管理軟件,實現了試樣批量處理、試驗結果實時判定、數據自動傳輸、設備運行狀態實時監測等智能管理功能;
4、機器人夾爪夾面的弧形設計,能夠有效保證夾持60mm厚的試樣時,依然保持橫平豎直;
5、全自動測量裝置取代傳統人工測量,即提高了精度也提高了效率。多種測量方式切換,兩種工作模式選擇,即可在線使用,也可離線使用。結構輕巧,移動方便。測量精度達到±0.01mm,適用的樣條范圍:厚度為3~60mm,長度為200~500mm;
6、采用協作六軸機器人,重復定位精度高。系統穩定性能優良;
7、生產數據可視化,操作畫面分級管理。安全防護系統完善。機器人夾爪保護、引伸計保護、全自動測量裝置等保護聯鎖有效可靠;
8、可根據試樣的不同要求,進行合格與不合格的分類擺放,方便操作人員。
近年來,科技高速發展、人口紅利消失、疫情的反復、限電政策的頒布等種種因素,讓越來越多的企業踏上了自動化升級之路,然而工廠布局空間的緊張、工人對于機械操作的低水平以及成本的控制無一不牽制著企業的發展。Delta德爾塔儀器建議客戶使用漸次自動化的模式,實現技術和商務上的風險可控,循序漸進。
未來,我們也將持續深耕智能制造領域,為更多領域更多客戶提供創新、有競爭力的解決方案、產品以及服務,旨在助力各種規模和不同行業的用戶加速自動化升級和柔性制造落地。


二維碼(微信公眾號)

二維碼(新浪微博)
 關閉返回
關閉返回